M82,雪茄星系
NASA APOD 20260417
-
相机 QHY294M Pro
-
曝光总时长 56h 49′
望远镜: Skyvision N300 F3.3
赤道仪: iOptron CEM120
曝光时长:
Lum/Clear: 131×300″
R: 110×120″
G: 141×120″
B: 136×120″
Hα: 396×300″
Astrobin Page: https://www.astrobin.com/vm68da





| 型号 | 截距增量* | 盘片 | 可用高度极限 (需考虑留下间隙空间) |
重量 |
| QHYCFW3XL | 21.5mm | 9 孔2英寸带框/
9 孔 50mm 无框 7 孔 50mm*50mm |
10mm | 1500g |
| QHYCFW3L | 21.5mm+(4mm) | 7 孔 2英寸带框/
50mm无框 |
10mm | 911g |
| QHYCFW3M-SR (标准) | 20.5mm+2mm | 5 孔2英寸带框/
50mm无框 |
10mm | 728g |
| QHYCFW3M-US (超薄) | 17mm+2mm | 7 孔36mm无框 | 5.5mm | 691g |
| QHYCFW3S-SR (标准) | 20mm+4mm | 7 孔 1.25英寸带框 | 10mm | 446g |
| QHYCFW3S-US (超薄) | 15.5mm+4mm | 7 孔 1.25英寸带框 | 5.5mm | 419g |
*关于截距增量及滤镜轮截距计算的说明
截距增量(Back focus Consumed): 由于接环间存在嵌合,组装后接环的增量不一定等于该接环本身的最大厚度。为方便计算,QHYCCD所提供的所有接环数据均以截距增量为基准,所有数据所显示的都是使用该接环对后截距的增量。关于截距的计算方法以及现阶段接环系统的详细说明,请参考页面接环系统 2.0。
滤镜轮的截距增量一共分为两部分:本体厚度及滤镜轮接环的截距增量。产品默认滤镜轮本体和接环是固定在一起的,在某些情况下,您可以卸下该接环以实现更短的截距。
在我们的接环系统图例中,滤镜轮本体和接环的截距增量会分开标注(如A1);在某些需要卸掉滤镜轮接环的场合,我们会标注重新组合的相机+滤镜轮的截距总和(如A2)
与QHY600搭配的大号滤镜轮CFWL会在出厂时直接将倾角调节环与滤镜轮本体固定,此时其截距增量为4mm而非标称的6mm。




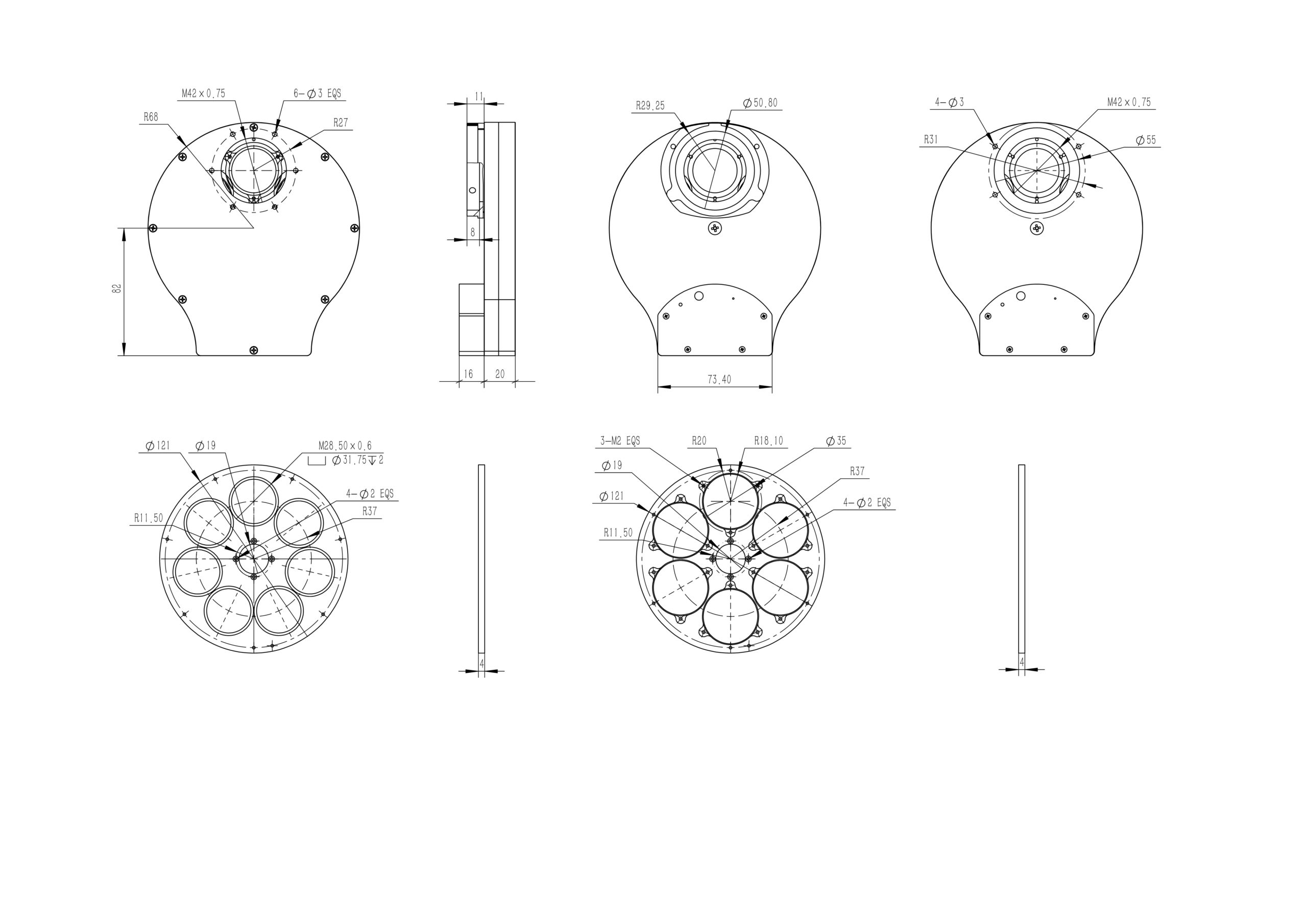
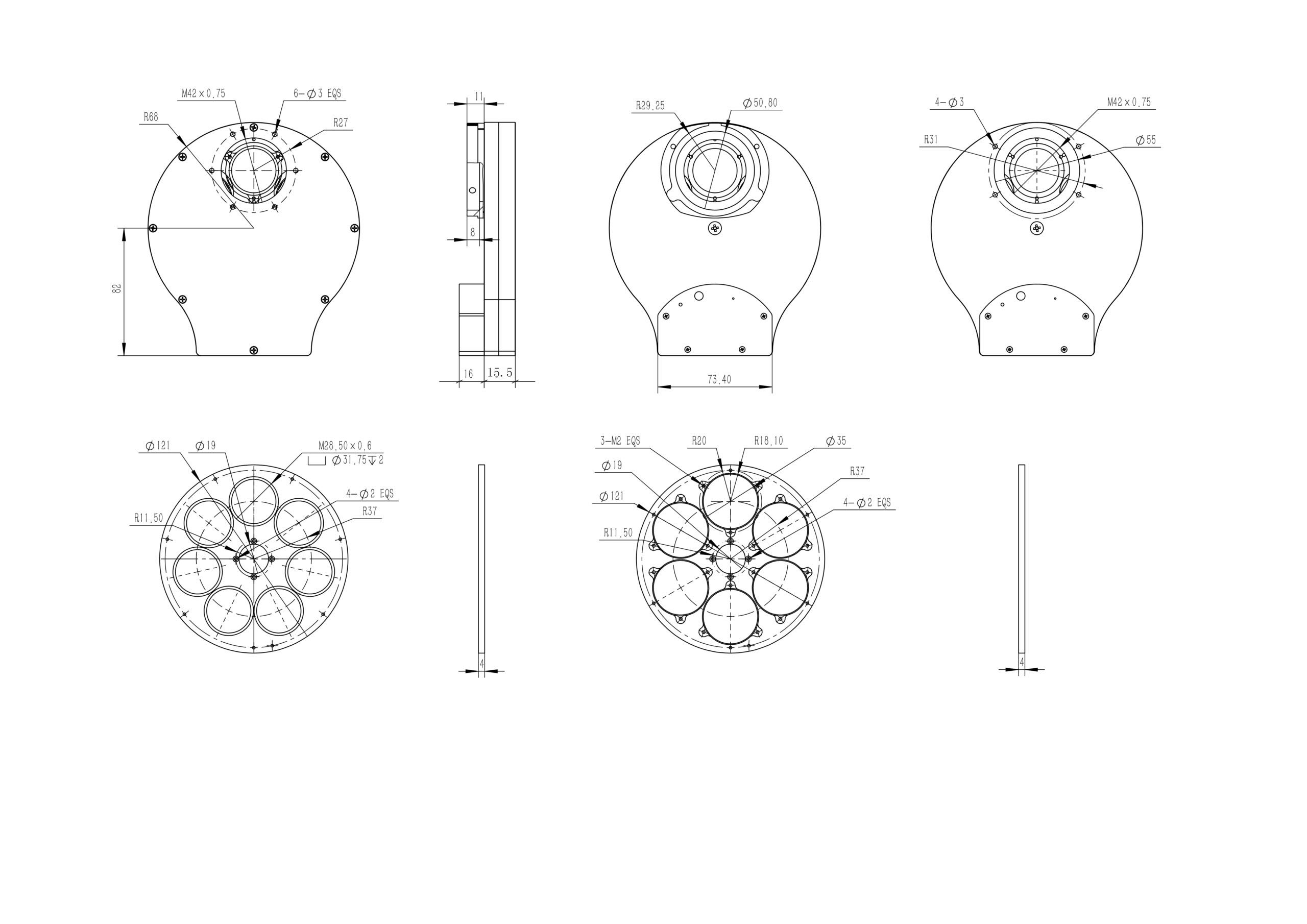
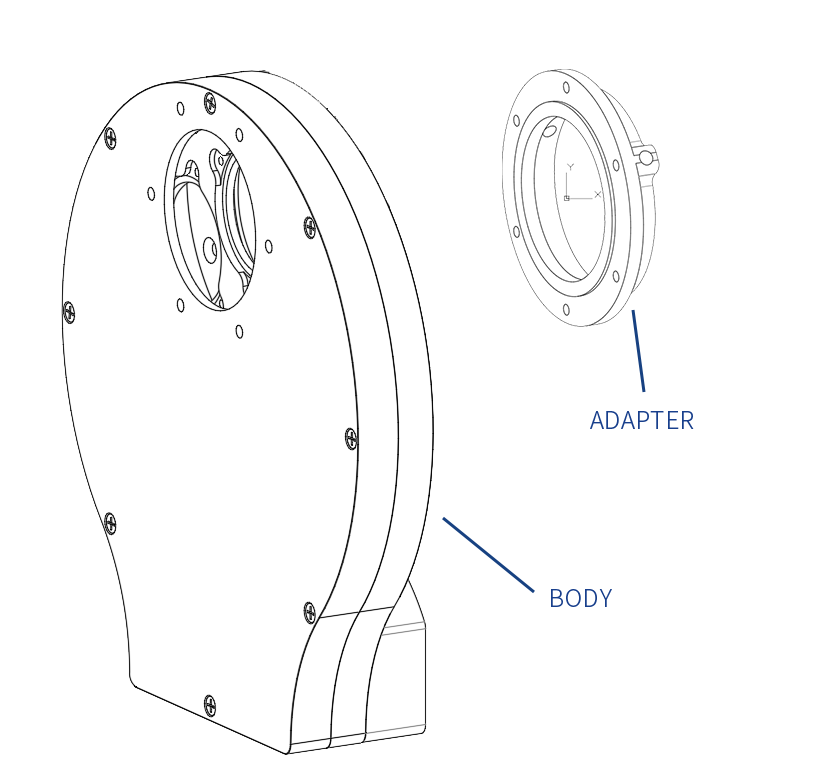
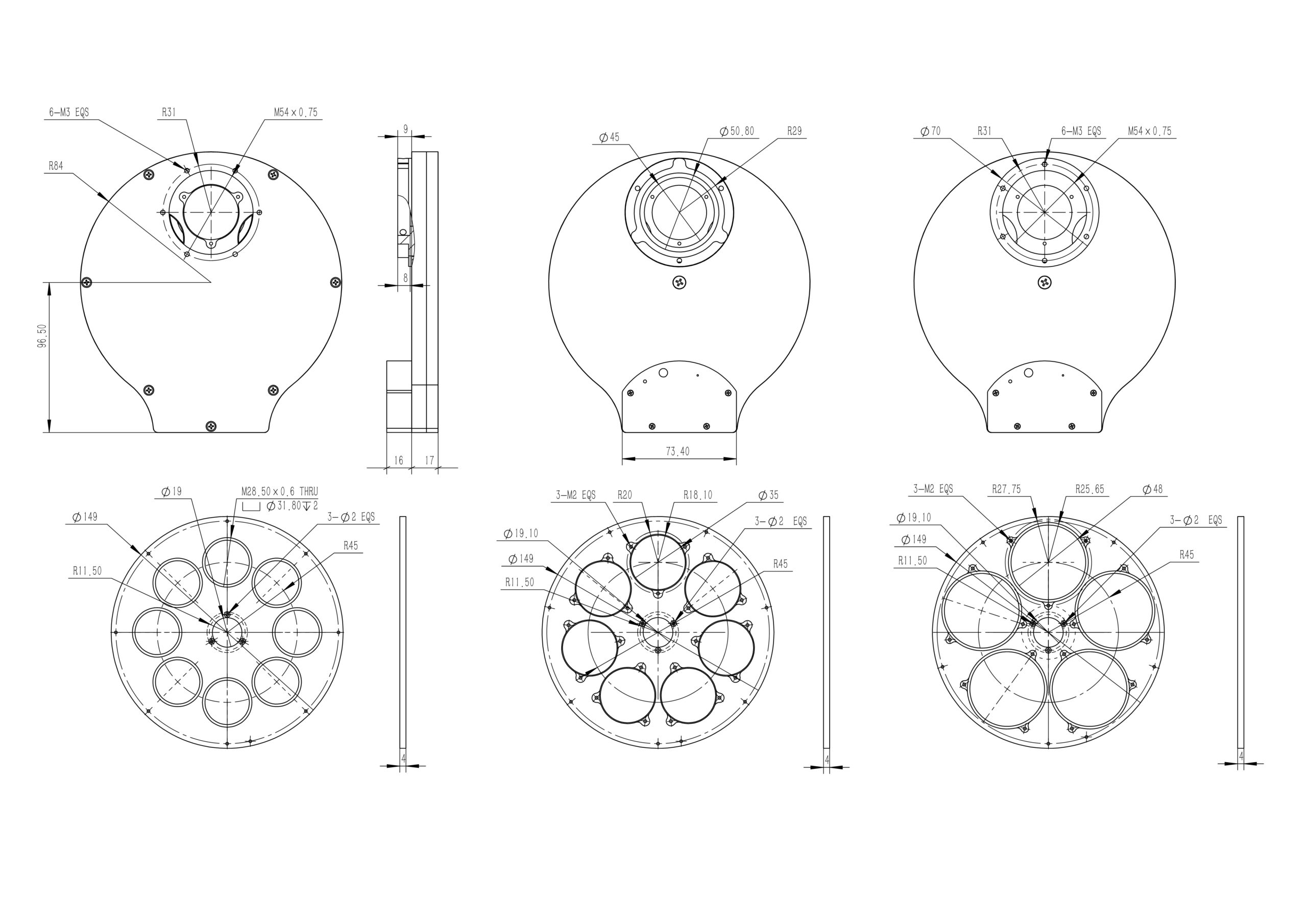
QHYCFW3-M-SR
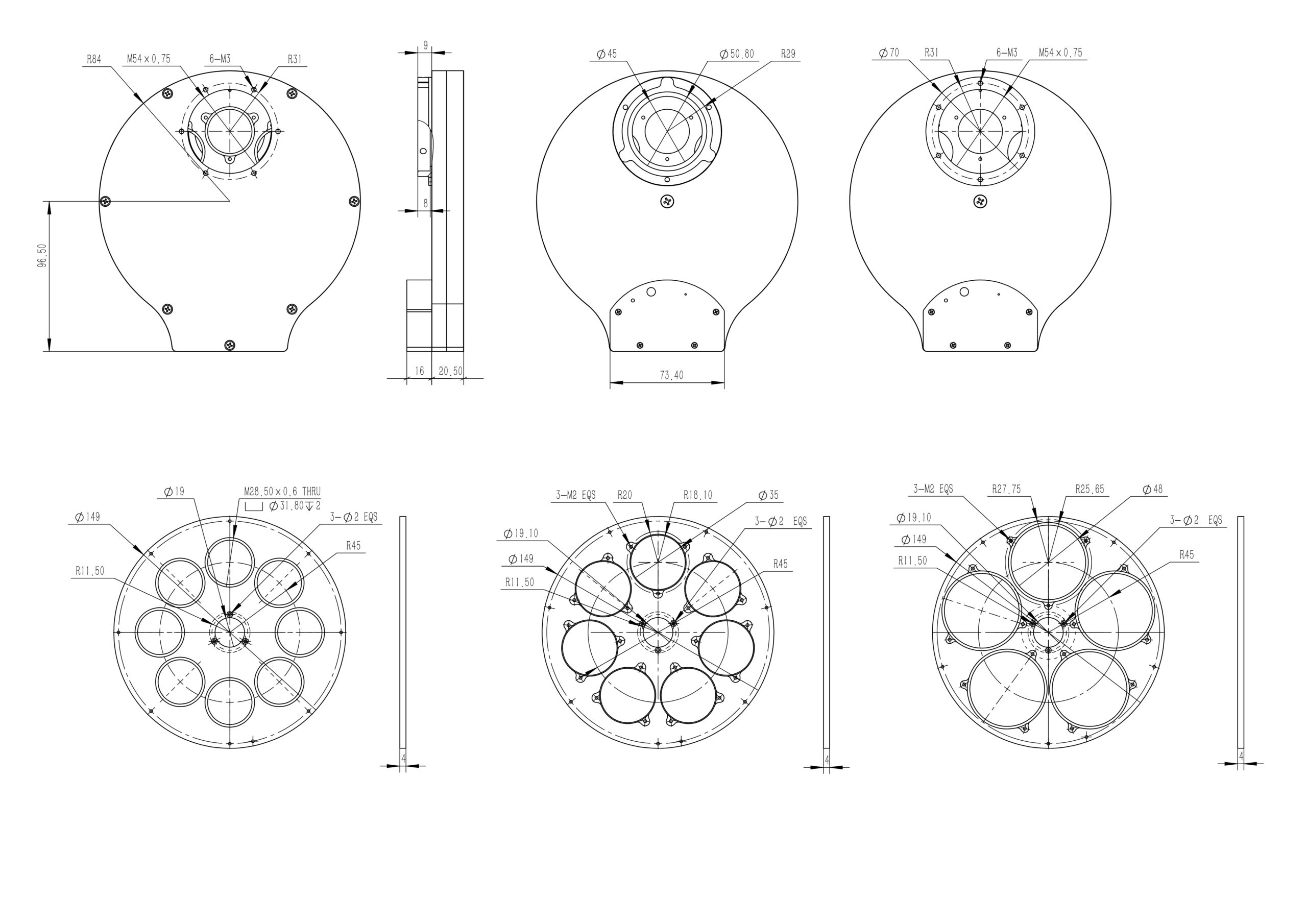
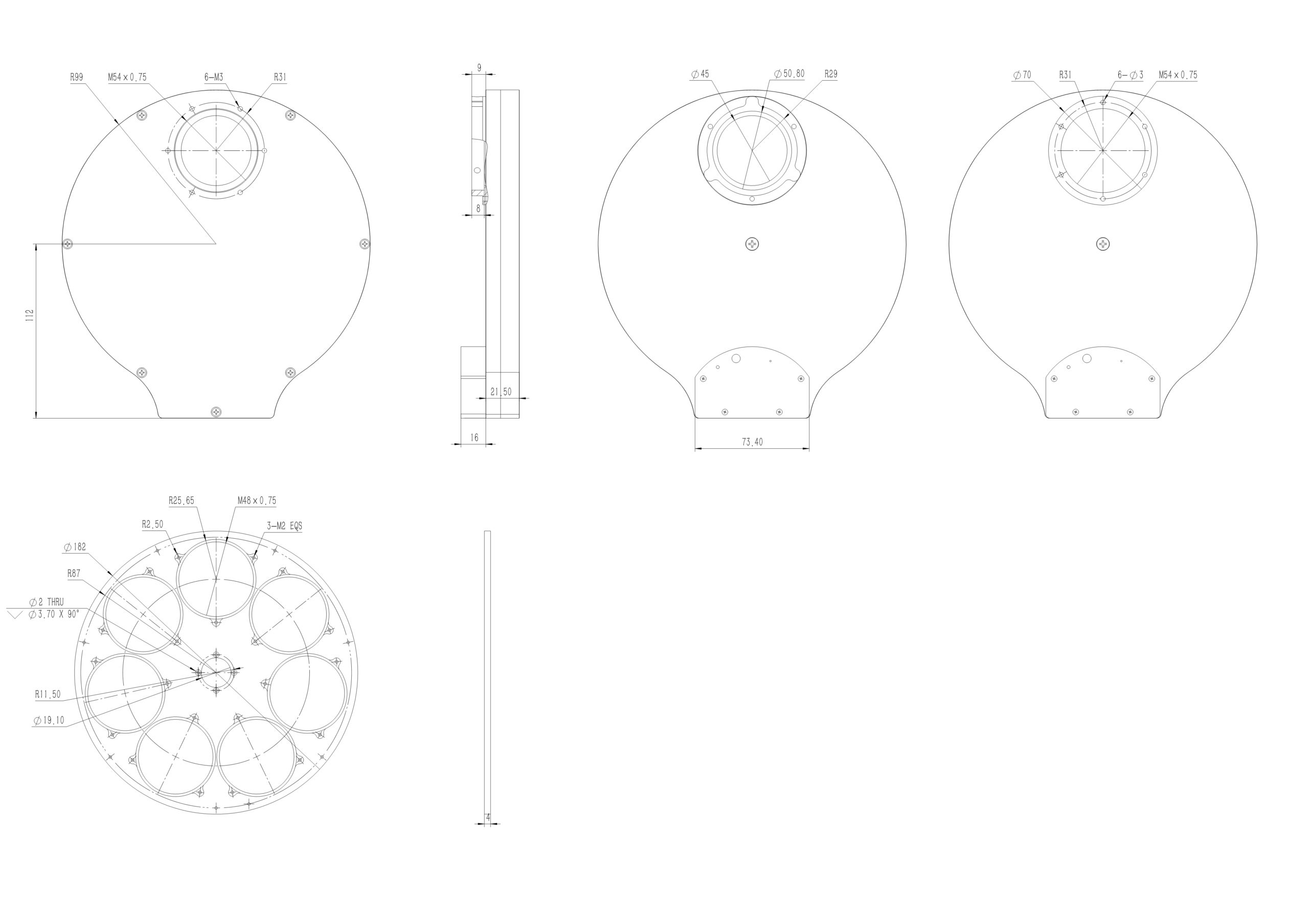
QHYCFW3-XL

1.控制端口切换按钮:滤镜轮上电处于待机状态时,按下按钮后,如果指示灯亮1S红色,则滤镜轮处于USB控制模式;如果指示灯亮1S绿色,则滤镜轮处于232串口控制模式
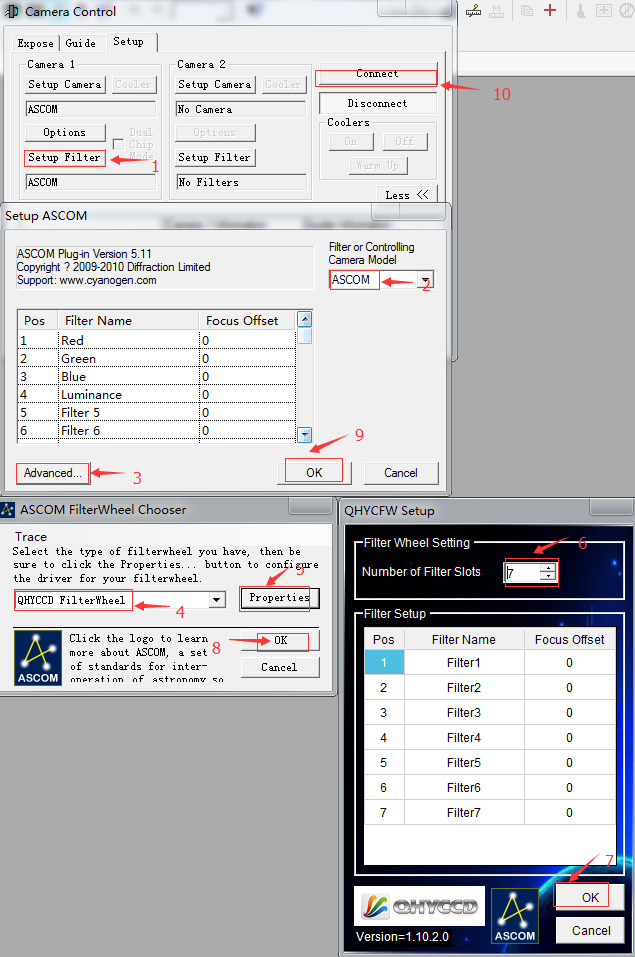
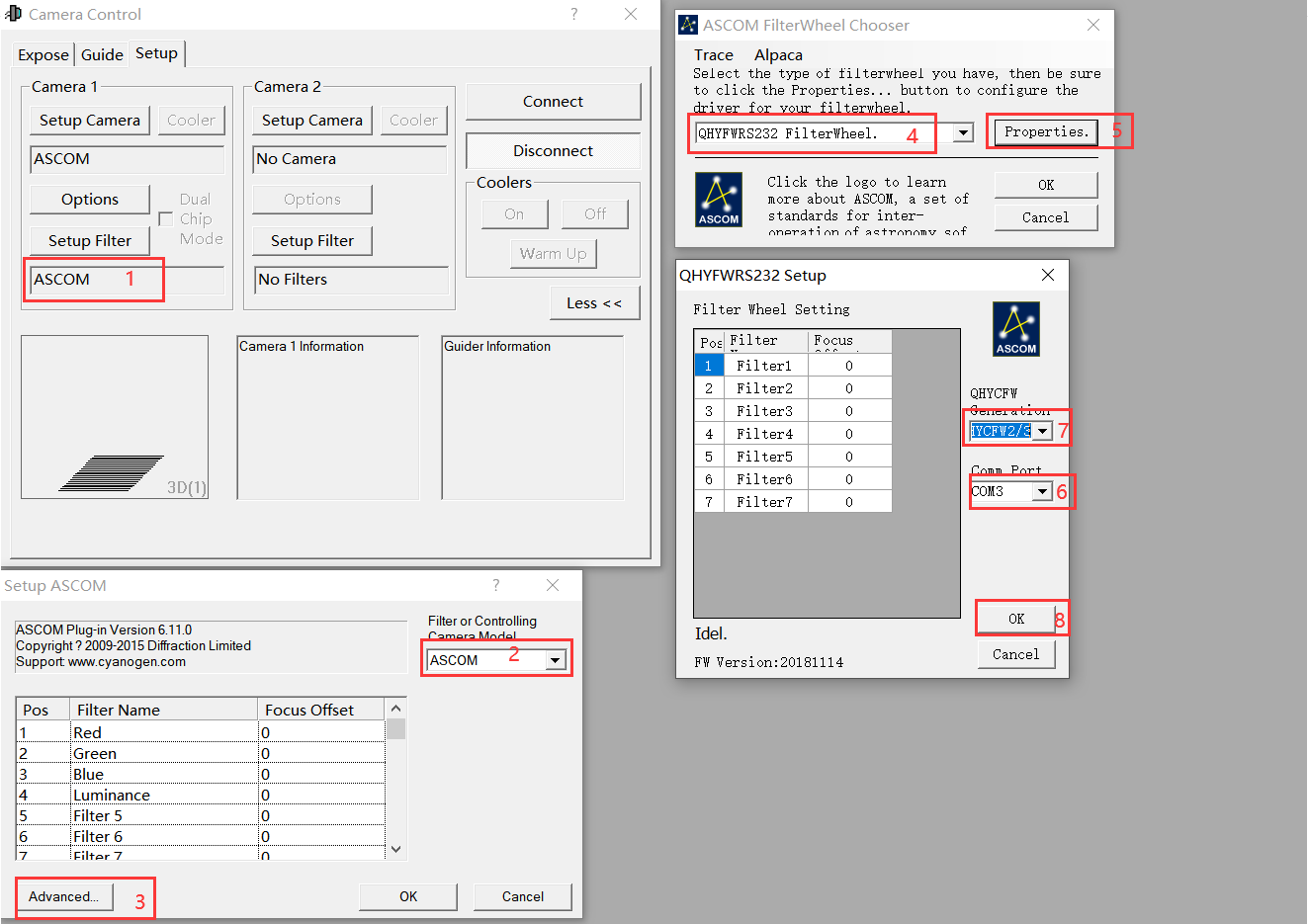
 连好相机后回到界面选择Setup Filter选择滤镜轮,按照步骤操作(如图所示)
连好相机后回到界面选择Setup Filter选择滤镜轮,按照步骤操作(如图所示)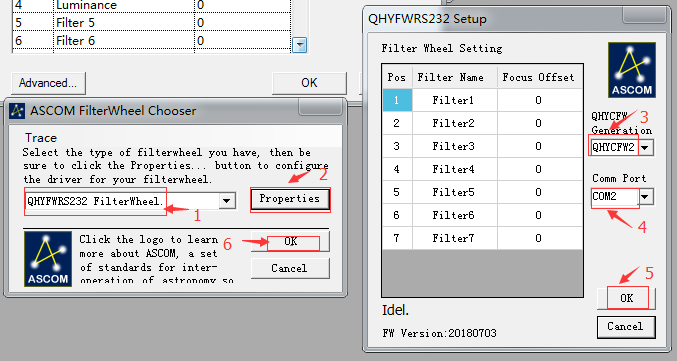
首先我们要确保我们必须装有EZCAP软件、滤镜轮驱动、相机驱动。这些都可以在我们官网上下载到最新版本。
这种方法是通过ASCOM来实现,不用连接相机只需要一根USB线来控制滤镜轮。首先,我们要切换控制端口按钮(如下图红箭头所示)实现USB口控制。(观察指示灯红灯表示USB控制模式)

用USB线插入滤镜轮的USB口,
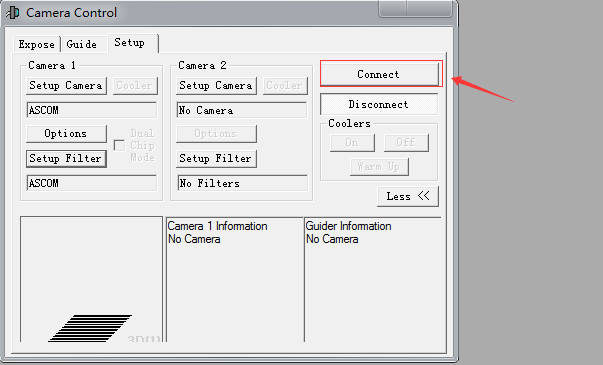
打开MaxIm DL软件,点击Camera Contorl。
弹出页面
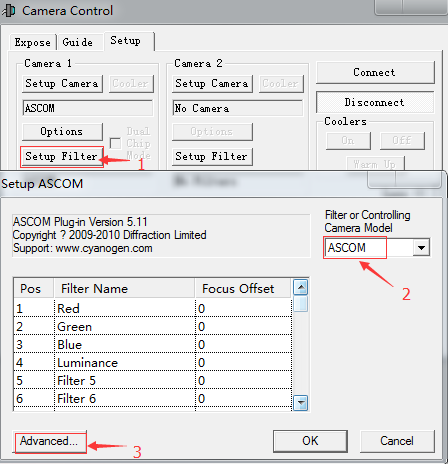
点击Setup 再点击Setup Camera 里的Camera model的下拉菜单里选择ASCOM选项
然后,点击右边的Advanced按钮,弹出一个ASCOM Camera Chooer的新窗口,再从中下拉菜单中选择一个虚拟相机型号。这样才能保证软件有序运行。
如下图所示:
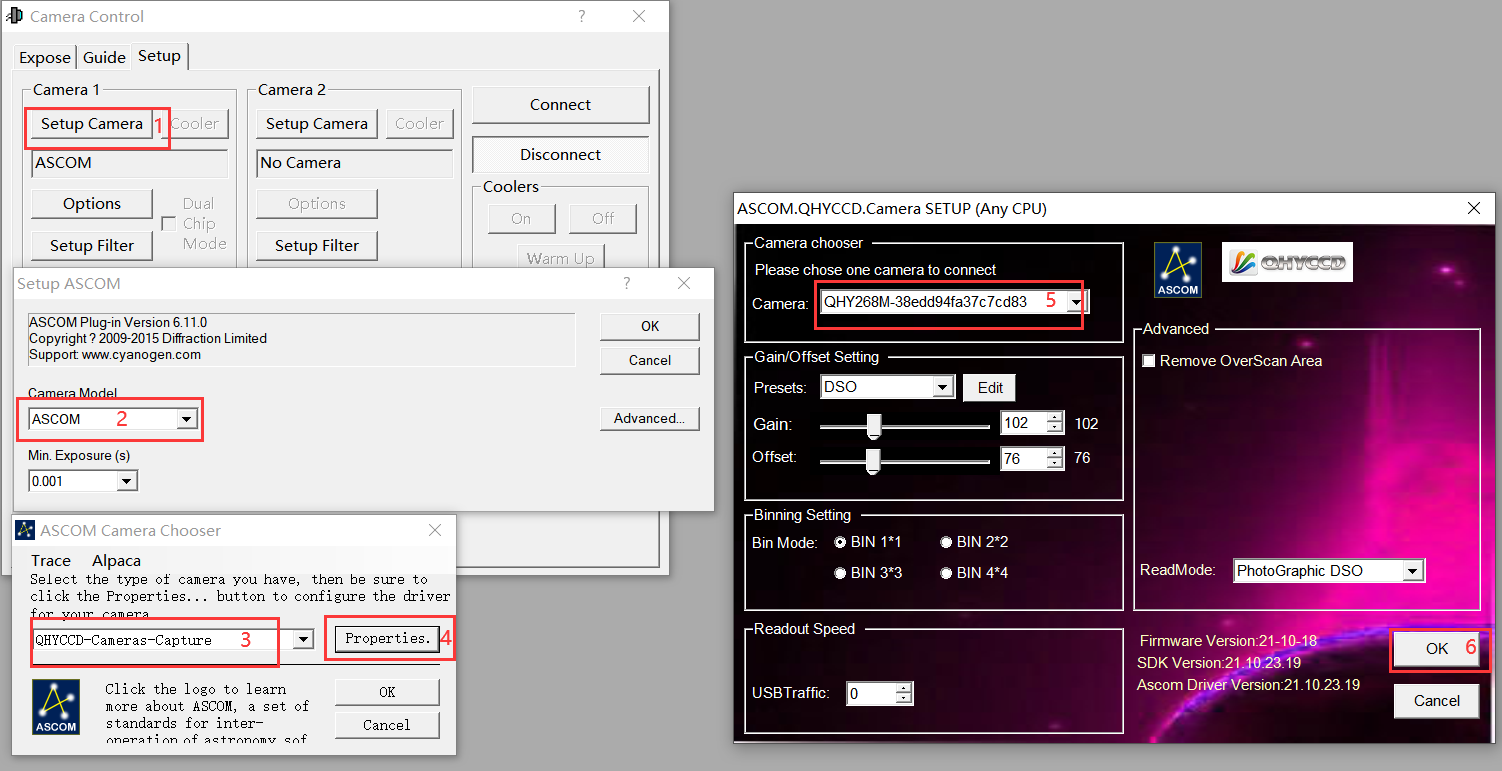
确认无误后,连续点击ok键。回到Camera Control页面。
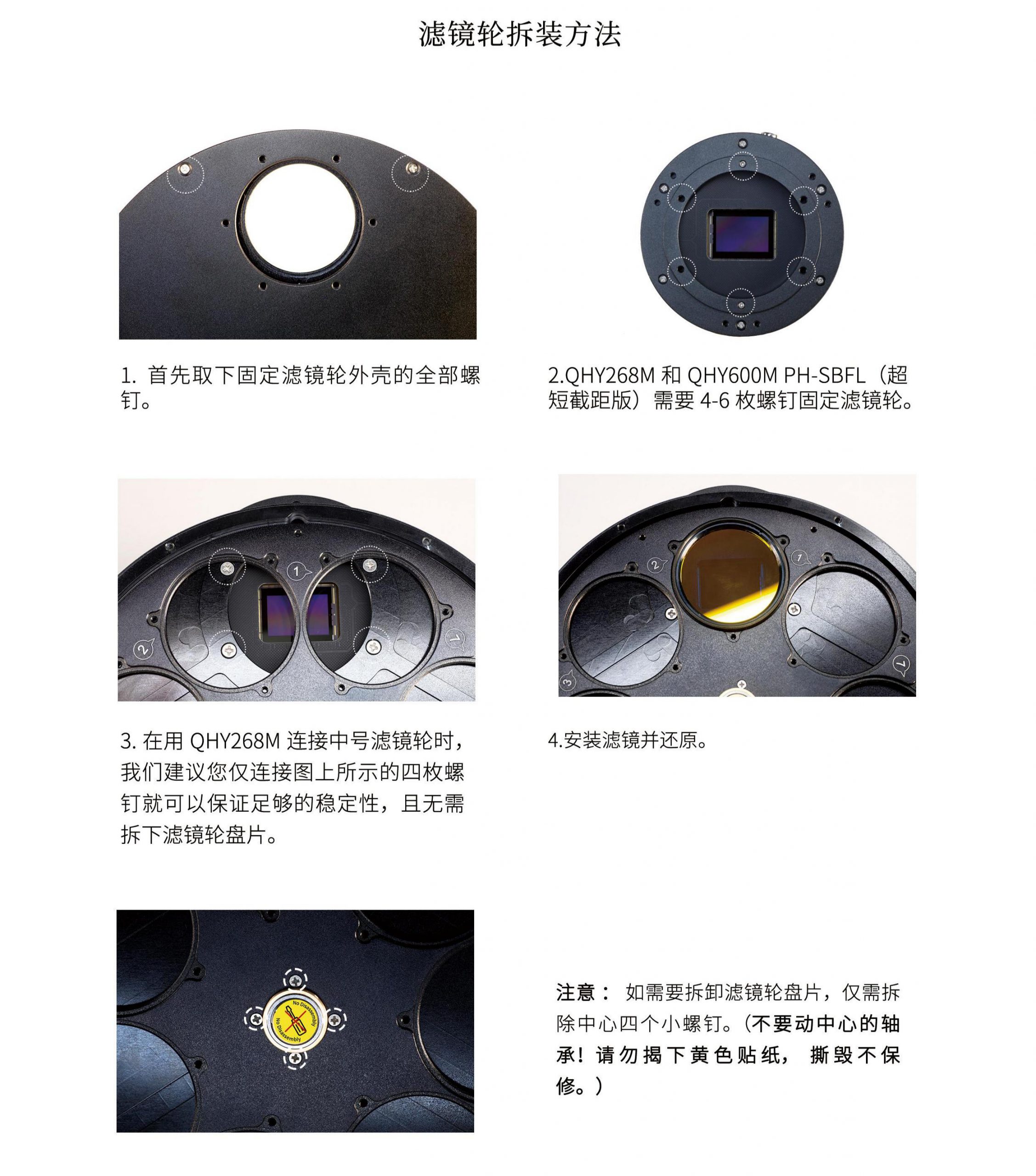
1.请勿将手指插入滤镜轮上的圆孔中,否则滤镜盘转动的时候可能会导致手指受伤。
2.滤镜轮内的中心铜柱是不能拆卸的,否则会导致滤镜轮松动,影响正常使用。
3.在相机使用控制线控制滤镜轮工作时,禁止同时使用USB线连接滤镜轮,以防电源冲突损坏滤镜轮。
4.使用USB线控制滤镜轮时可能会遇到因USB口供电不足引起的无法控制轮盘转动,遇到此情况请增加滤镜轮外接电源,此电源线可以在配件中找到。
5.滤镜轮切换顺序红灯为USB控制模式,绿灯为相机控制模式。
6.对于无框滤镜,使用螺丝压镜片的时候,必须通过垫片来压,而不能直接用螺丝的金属螺帽来压。否则可能有压碎镜片的风险。
7.在使用有框滤镜时请注意滤镜框螺纹不能超过2.5mm,否则会在运行时会卡住滤镜轮外壳。安装滤镜时请注意不要要超出该款滤镜轮规定的可用高度极限,如上表。
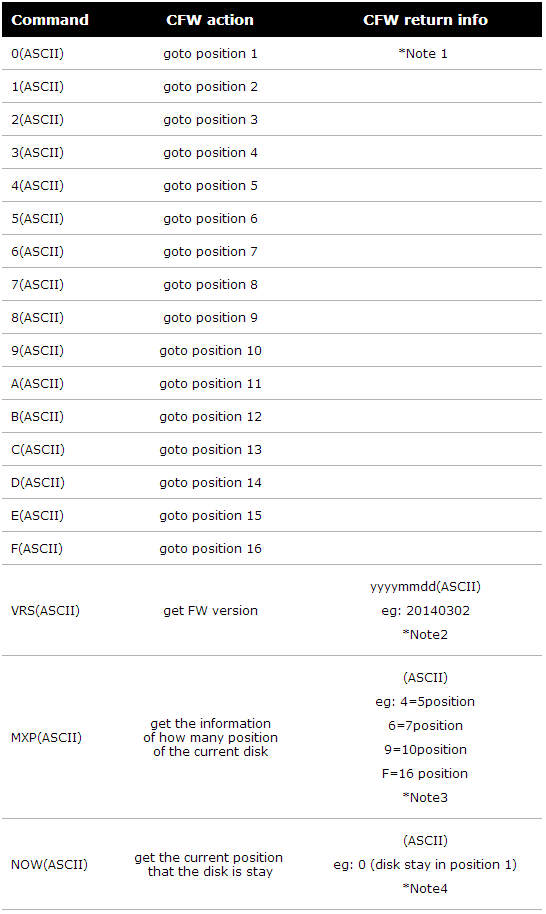
Note 1: When send a goto command to QHYCFW3. Motor will start goto the target position. After arrived. QHYCFW3 will send back the current position.
For example: Now QHYCFW3 is in position 1(position1=command 0) and tar(et is position 4(position4=command 3). After the color wheel arrived the target , it will send back
3(ASCII)
But if current position is 1 (position1=command 0) and you send the same position (command 0) to QHYCFW3 . Color wheel will not rotate. And in the old version (the version before 201409) the color wheel will not send back any info in this condition. In the new version . the color wheel will send the current position:
0(ASCII)
This modification is used to judge if the colorwheel has arrived the target for the host software.
Note 2: There is no this function before Version 201409. If you call this function QHYCFW2 will reply nothing.
Note 3:Tere is no this function before Version 201409. If you call this function QHYCFW2 will reply nothing.
Note 4:Tere is no this function before Version 201409. If you call this function QHYCFW2 will reply nothing.
VRS MXP NOW RESET
 图中现象是因为内部反光会导致拍摄窄带的时候出现周围亮中间暗的漏光问题。
图中现象是因为内部反光会导致拍摄窄带的时候出现周围亮中间暗的漏光问题。
原因是因为最早之前的滤镜轮内部没有做消光处理,需要在内部贴消光绒的方式避免反光。(新版本2022年10月起的滤镜轮内部已经进行消光处理,不会遇到此类问题)
